
Real-time Intelligent Planning and Control System
Funded by US DOD, 2025
In collaboration with Perceptronics Solutions, we develop intelligent multi-robot planning algorithms for search and tracking multiple targets in large open space.
Paper: Hierarchical Planning for Long-Horizon Multi-Target Tracking Under Target Motion Uncertainty accepted by IEEE RA-L
Illustrative scenario: 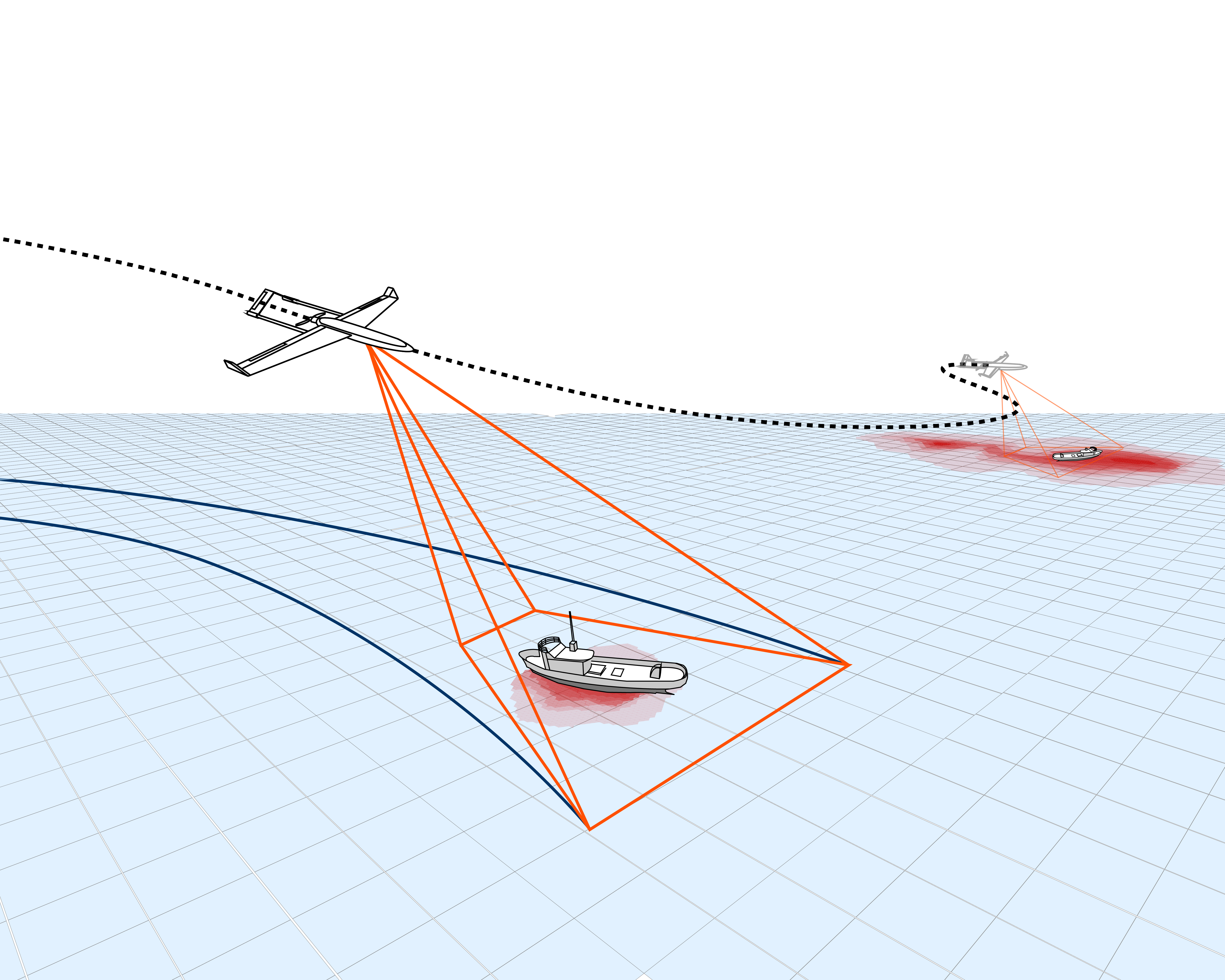
Human tracking in field experiments: